 kafka之broker
kafka之broker
# 1.kakfa 之contronller
Kafka 控制器组件(Controller) 即 Broker, 是 Kafka 的核心组件。它的主要作用是在 ZooKeeper 的帮助下管理和协调整个 Kafka 集群。集群中任意一台 Broker 都能充当控制器的角色,但是在运行过程中,只能有一个 Broker 成为控制器,来执行管理和协调的职责。换句话说,每个正常运转的 Kafka 集群,在任意时刻都有且只有一个控制器。
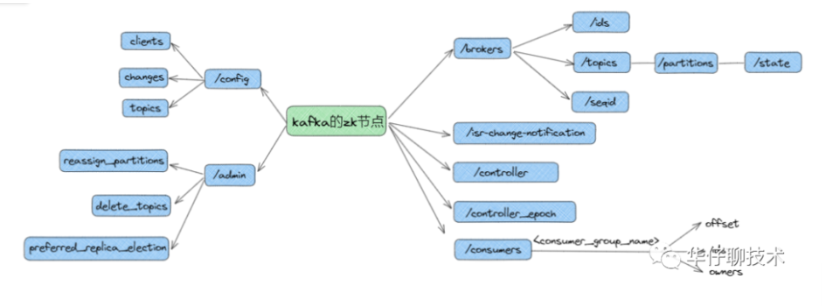
首先kafka broker是依赖zookeeper来维护成员信息的:
- Kafka 使用 Zookeeper 的临时节点来选举 Controller
- Zookeeper 在 Broker 加入集群或退出集群时通知 Controller
- Controller 负责在 Broker 加入或离开集群时进行分区 Leader 选举
# 2.控制器的主要作用
①topic管理:
这里说的Topic管理,是指控制器帮助我们完成对 Kafka 主题的创建、删除以及分区增加的操作, 大部分的后台工作都是控制器来完成的。
②分区重分配
当一个新的 broker 刚加入集群时,不会自动地分担己有 topic 的负载,它只会对后续新增的 topic 生效。
如果要让新增 broker 为己有的 topic 服务,用户必须手动地调整现有的 topic 的分区分布,将一部分分区搬移到新增 broker 上。这就是所谓的分区重分配****reassignment操作。
除了处理 broker 扩容导致的不均衡之外,再均衡还能用于处理 broker 存储负载不均衡的情况,在单个或多个 broker 之间的日志目录之间重新分配分区。用于解决多个代理之间的存储负载不平衡。
③leader选举
触发分区 leader 选举的几种场景:
Offline:创建新分区或分区失去现有 leader
Reassign:用户执行重分配操作
PreferredReplica:将 leader 迁移回首选副本
ControlledShutdown:分区的现有 leader 即将下线
当上述几种情况发生时,Controller 会遍历所有相关的主题分区并为其指定新的 Leader。然后向所有包含相关主题分区的 Broker 发送更新请求,其中包含了最新的 Leader 与 Follower 副本分配信息。待更新完毕后,新 Leader 会开始处理来自生产者和消费者的请求,而 Follower 开始从新 Leader 那里复制消息。
④集群成员管理
这是控制器提供的集群成员管理功能, 主要包括自动检测新增 Broker、Broker 主动关闭及被动宕机, 而这种自动检测主要是依赖于 Watch 通知功能和 ZooKeeper 临时节点组合实现的。
比如,控制器组件会利用 Watch 机制 检查 ZooKeeper 的 /brokers/ids 节点下的子节点数量变更。目前,当有新 Broker 启动后,它会在 /brokers 下创建 临时的 znode 节点。一旦创建完毕,ZooKeeper 会通过 Watch 机制将消息通知推送给控制器,这样,控制器就能自动地感知到这个变化。
⑤提供数据服务
控制器会向其他 Broker 提供数据服务。控制器上保存了最全的集群元数据信息,其他所有 Broker 会定期接收控制器发来的元数据更新请求,从而更新其内存中的缓存数据。
# 3. 控制器存储了哪些消息
| **分类 ** | **数据描述 ** |
|---|---|
| Broker相关 | 当前存活的broker列表 |
| 正在关闭中的broker列表 | |
| 获取某个broker上的所有分区 | |
| 某组broker上的所有副本 | |
| Topic相关 | topic列表 |
| 某个topic的所有分区和所有副本 | |
| 移除某个topic的所有信息 | |
| 每个分区的Leader和ISR信息 | |
| 运维任务副本相关 | 正在进行的PreferredLeader选举的分区 |
| 当前存活的所有副本 | |
| 分配给每个分区的副本列表 | |
| 正在进行重分配的分区列表 | |
| 某组分区下的所有副本 |
从上面表格可以看出,存储的大概有3大类:
- 所有topic信息。包括具体的分区信息,比如 Leader 副本是谁,ISR 集合中有哪些副本等。
- 所有 Broker 信息。包括当前都有哪些运行中的 Broker,哪些正在关闭中的 Broker 等。
- 涉及运维任务的副本分区。包括当前正在进行 Preferred Leader选举以及分区重分配的分区列表等。
# 4.控制器的故障转移
既然broker集群中只有一个控制器,那么当控制器挂掉了,该怎么办呢?怎么快速找到一个新的控制器呢?这就涉及到了控制器的故障转移:
Failover:故障转移指的是,当运行中的控制器突然宕机时,Kafka 能够快速地感知到,并立即启用备用控制器来代替之前失败的控制器。这个过程就被称为 Failover,该过程是自动完成的,无需人工干预。下面通过一张图来展示控制器故障转移的过程。
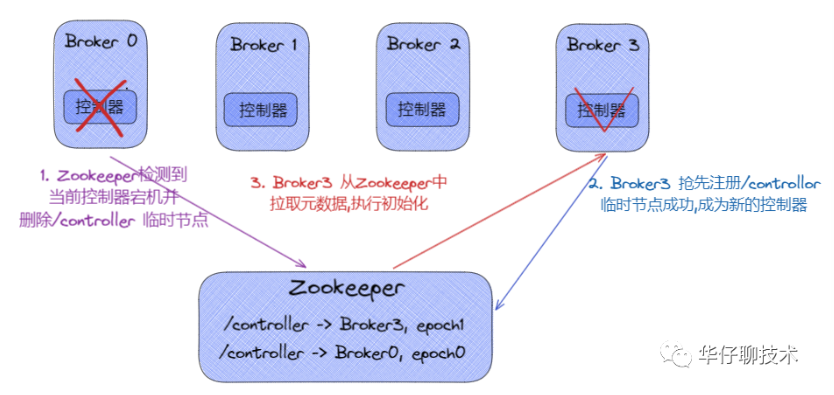
核心是通过zookeeper创建/controller,其他非控制器节点监视/controller目录。
如上图所示: 最开始时候,Broker 0 是控制器。当 Broker 0 被检测宕机后,ZooKeeper 通过 Watch 机制感知到并删除了 /controller 临时节点。之后,所有还存活的 Broker 开始竞选新的控制器。这时 Broker 3 最终赢得了选举,成功地在 ZooKeeper 上重建了 /controller 临时节点。Broker 3 会从 ZooKeeper 中读取集群元数据信息,并初始化到自己的缓存中。控制器的 Failover 完成,这时候就可以正常工作了。(当然epoch会+1)
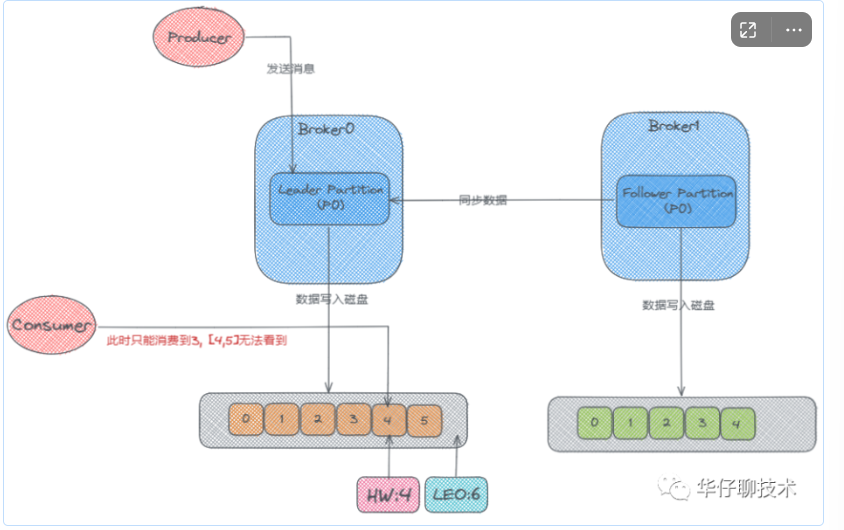
# 5.kafka之HW高水位与LEO机制(解决分区副本之间的数据一致)
首先这里有两个Broker,也就是两台服务器,然后它们的分区中分别存储了两个 p0 的副本,一个是 Leader,一个是 Follower, 此时生产者开始往 Leader Partition 发送数据,数据最终写到磁盘上的。然后 Follower 会从 Leader那里去同步数据,Follower上的数据也会写到磁盘上。**可是 Follower 是先从 Leader 那去同步然后再写入磁盘的,所以它磁盘上面的数据肯定会比 Leader 的那块少一些**。
在日志复制中,涉及到以下一些重要的偏移(offset)概念:
- 起始位移base offset:副本中所含第一条消息的 offset
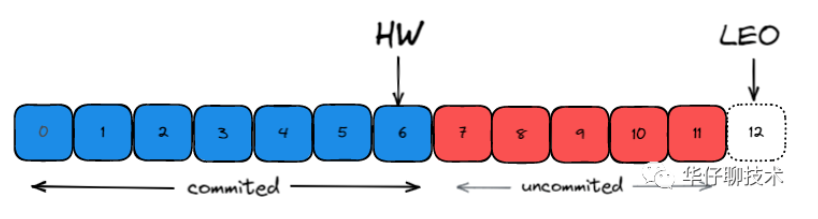
- 高水位high watermark:副本最新一条己提交消息的 offset
- 日志末端位移log end offset:副本中下一条待写入消息的 offset(日志末端位移,代表日志文件中下一条待写入消息的offset,这个offset上实际是没有消息的。不管是leader副本还是follower副本,都有这个值。当leader副本收到生产者的一条消息,LEO通常会自增1,而follower副本需要从leader副本fetch到数据后,才会增加它的LEO,最后leader副本会比较自己的LEO以及满足条件的follower副本上的LEO,选取两者中较小值作为新的HW,来更新自己的HW值。)
在 Kafka 中高水位的作用主要有2个:
- 用来标识分区下的哪些消息是可以被消费者消费的。(高水位以后的数据只是发送到了broker中,但是还没有真正的进行持久化,不建议该部分被消费者消费)
- 协助 Kafka 完成副本数据同步
而LEO一个重要作用就是用来更新HW:
- 如果 Follower 和 Leader 的 LEO 数据同步了, 那么 HW 就可以更新了。
- HW 之前的消息数据对消费者是可见的, 属于 commited 状态, HW 之后的消息数据对消费者是不可见的。
如上图所示: 每个副本会同时维护 HW 与 LEO 值:
- Leader 保证只有 HW 及其之前的消息,才对消费者是可见的。
- Follower 宕机后重启时会对其日志截断,只保留 HW 及其之前的日志消息(新版本有改动)
- 对于日志末端位移, 即 Log End Offset (LEO)。它表示副本写入下一条消息的位移值。注意: 数字 12 所在的方框是虚线,说明这个副本当前只有 12 条消息,位移值是从 0 到 11,下一条新消息的位移是 12。显然,介于高水位和 LEO 之间的消息就属于未提交消息。即同一个副本对象,其高水位值不会大于 LEO 值。
- 高水位和 LEO 是副本对象的两个重要属性。Kafka 使用 Leader 副本的高水位来定义所在分区的高水位。即分区的高水位就是其 Leader 副本的高水位。
# 6. HW和LEO更新机制
从上面我们也就可以知道,其实leader partion决定了当前分区的hw和leo,也就决定了消费者可以消费该分区的哪个位置。而follower副本的要做的就是怎么去根据leader的hw和leo更新自己的hw和leo
从上面讲解我们知道了每个副本对象都保存了一组HW值和 LEO 值,但实际上,在 Leader 副本所在的 Broker 上,还保存了其他 Follower 副本的 LEO 值。看下图所示:
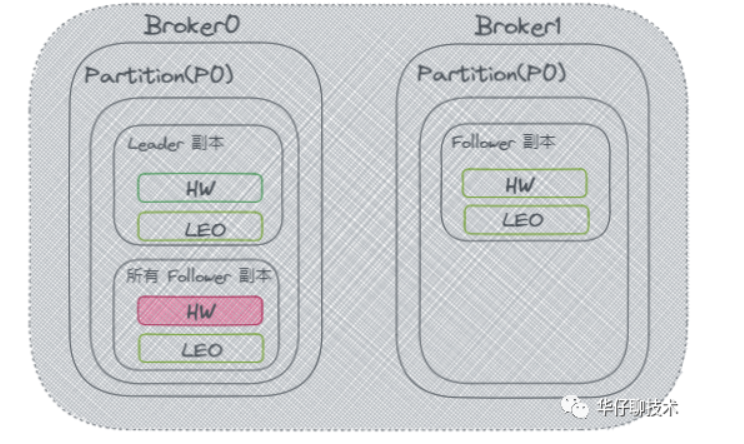
Kafka 副本机制在运行过程中,会更新 Broker 1 上 Follower 副本的高水位和 LEO 值,同时也会更新 Broker 0 上 Leader 副本的高水位和 LEO 以及所有 Follower 副本的 LEO,但它不会更新所有 Follower 的高水位值,也就是我在图中标记为粉红色的部分。
Kafka之所以要在 Broker 0 上保存这些所有 Follower 副本, 就是为了帮助 Leader 副本确定其高水位,也就是分区高水位。
接下来,我们从Leader 副本 和 Follower 副本两个维度,来总结一下高水位和 LEO 的更新机制。
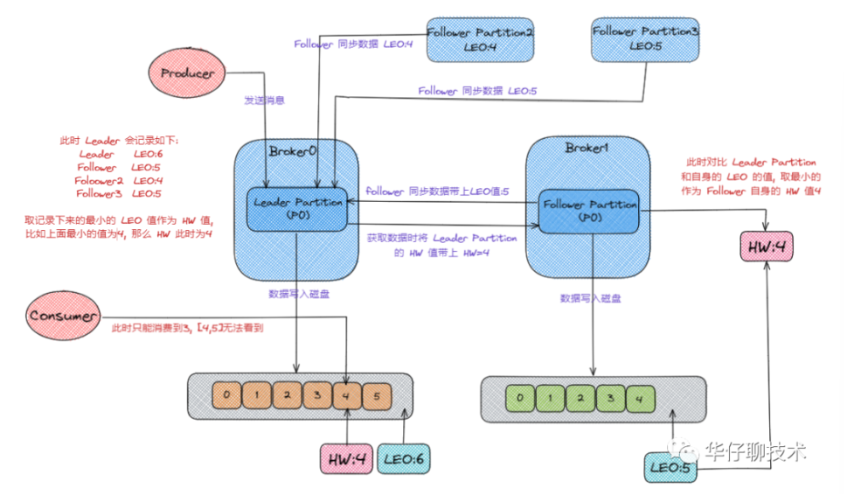
首先 Follower 在从 Leader 同步数据的同时会带上自己的 LEO 的值,可是在实际情况中有可能p0的副本可能会是多个。它们也从 Leader Partition 同步数据并带上自己的LEO。Leader Partition 就会记录这些 Follower 同步过来的 LEO,然后取最小的 LEO 值作为 HW 值 。
之所以要这么做是为了保证如果 Leader Partition 宕机时,集群会从其它的 Follower Partition 里面选举出一个新的 Leader Partition。这时候无论选举了哪一个节点作为 Leader,都能保证存在当前待消费的数据,保证数据的安全性。
那么此时 Follower 自身 HW 的值如何确定,即 Follower获取数据时也会带上 Leader Partition 的 HW 的值,然后和自身的 LEO 值取一个较小的值作为自身的 HW 值 。

# 7.LeaderEpoch机制(仅用LEO和HW会造成数据丢失)
一种版本:https://juejin.cn/post/7004070620996567048
kafka中的复制协议大体有两个阶段,第一阶段:follower副本从leader副本同步数据,它取到了m2这条消息。第二阶段:在下一轮的RPC调用中follower会确认收到了m2这条消息,假定其它的follower副本也都确认成功收到了这条消息,Leader副本才会更新其高水位HW,并且会在follower再次从Leader副本同步获取数据的时候会把这个高水位值放在请求响应中回传给follower副本。由此可以看出,leader副本控制着高水位HW的进度,并且会在随后的RPC调用中回传给follower副本。
另一种版本:https://mp.weixin.qq.com/s?__biz=Mzg3MTcxMDgxNA==&mid=2247488847&idx=1&sn=fe2dace4ebf39001062fa331711606ba&chksm=cefb3c7ef98cb5689c91b02edb345cc75751ae7e2daf27d8de9a47f9ecc3eedaf3551eead037&scene=178&cur_album_id=2147575846151290880#rd
从上一小节看数据同步似乎很完美,依托于 HW 和 LEO ,Kafka 既完美实现了消息的对外可见性,又实现了异步的副本同步机制。但是从上一节的讲解分析中,我们知道,Follower 副本的 HW 更新需要一轮额外的拉取请求才能实现。如果把上一小节图中例子扩展到更多个 Follower 副本,也许需要更多轮拉取请求。也就是说,Leader 副本 HW 更新和 Follower 副本 HW 更新在时间上是存在错配的。这种错配是很多“数据丢失”或“数据不一致”问题的根源。因此社区在 0.11 版本正式引入了 Leader Epoch 概念,来规避因HW 更新错配导致的各种不一致问题。
所谓 Leader Epoch,我们大致可以认为是 Leader 版本。它由两部分数据组成。
- Epoch: 一个单调递增的版本号。每当副本 Leader 权发生变更时,都会增加该版本号。小版本号的 Leader 被认为是过期 Leader,不能再行使 Leader 权力。
- 起始位移(Start Offset): Leader 副本在该 Epoch 值上写入的首条消息的位移。
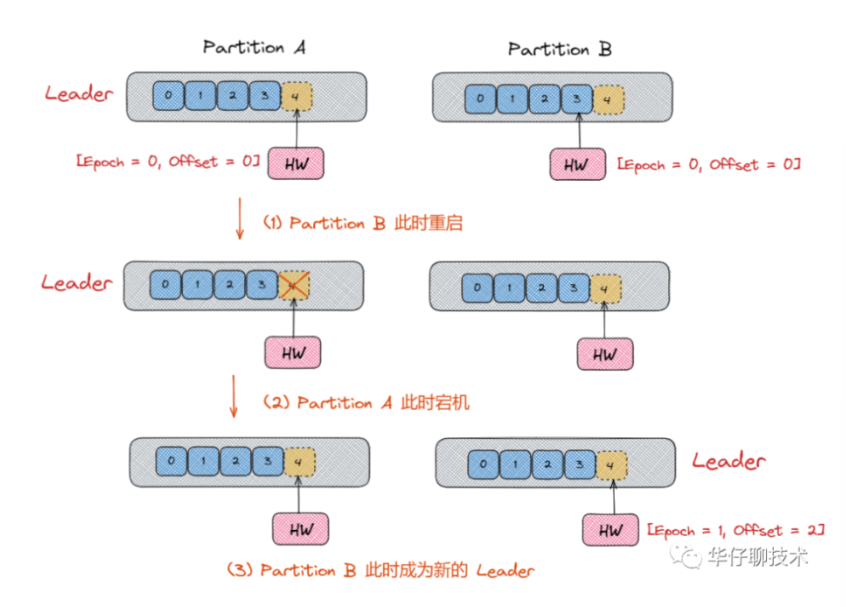
Kafka Broker 会在内存中为每个分区都缓存 Leader Epoch 数据,同时它还会定期地将这些信息持久化到一个 checkpoint 文件中。当 Leader Partition 写入消息到磁盘时,Broker 会尝试更新这部分缓存。如果该 Leader 是首次写入消息,那么 Broker 会向缓存中增加一个 Leader Epoch 条目,否则就不做更新。这样,每次有 Leader 变更时,新的 Leader 副本会查询这部分缓存,取出对应的 Leader Epoch 的起始位移,以避免数据丢失和不一致的情况。接下来,我们先看一个无 Leader Epoch 机制造成数据丢失的场景图, 如下:
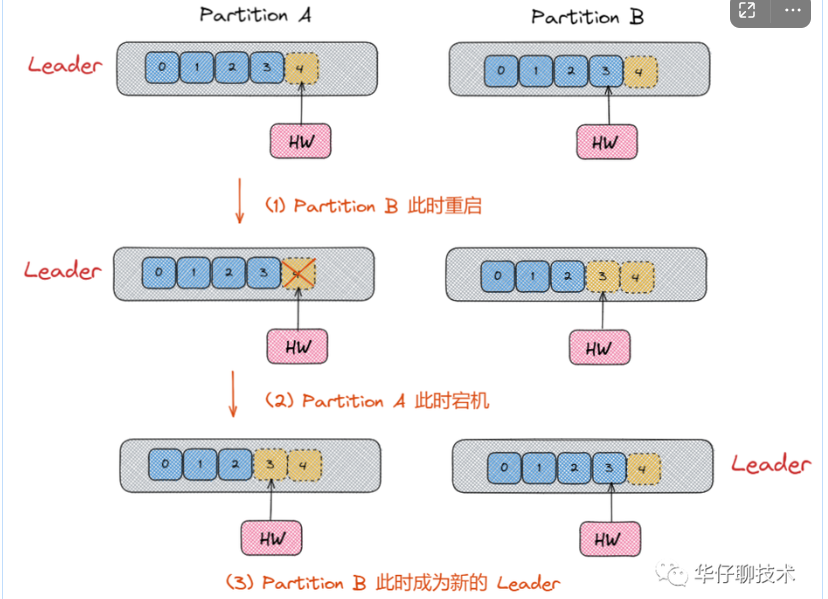
正如上图描述的,单纯依靠 HW 是怎么造成数据丢失的。一开始时,Partition A 和Partition B 都处于正常状态,A 是 Leader Partition 。现在我们假设 Leader Partition 和 Follower Partition 都写入了这4条消息,而且 Leader Partition 的 HW 已经更新了,但 Follower Partition 的 HW 还未更新(这种情况是可能能会发生的)。上面说过,Follower 的 HW 更新与 Leader 的 HW 是存在时间错配的。**如果此时 Partition B 所在的 Broker 宕机,当它重启回来后,Partition B 会执行日志截断操作,将 LEO 值调整为之前的 HW 值,也就是 3。**即位移值为 3 的那条消息被副本 B 从磁盘中删除,此时副本 B 的底层磁盘文件中只保存有 3 条消息,即位移值为 [0,1,2] 对应的消息。
当执行完截断操作后,Partition B 开始从 Partition A 拉取消息,执行正常的消息同步。如果就在这个时候,Partition A 所在的 Broker 宕机了,那么 Kafka 就很无奈,只能让Partition B 成为新的 Leader,此时,当 Partition A 回来后,需要执行相同的日志截断操作,即将 HW 调整为与 Partition B 相同的值,也就是 3。这样操作之后,位移值为 3 的那条消息就从这两个 Partition 中被永远地抹掉了。这就是这张图要展示的数据丢失场景。
严格来说,这个场景发生的前提必须是Broker 端参数 min.insync.replicas 设置为 1。此时一旦消息被写入到 Leader 副本的磁盘,就会被认为是“commited状态”,但因存在时间错配问题导致 Follower 的 HW 更新是有滞后的。如果在这个短暂的滞后时间内,接连发生 Broker 宕机,那么这类数据的丢失就是无法避免的。
接下来, 我们来看下如何利用 Leader Epoch 机制来规避这种数据丢失。如下图所示:
# 8. kafka延迟任务 时间轮机制
接下来,我们简单聊聊 Kafka 中的延迟任务, 大家知道在 Kafka 中存在着大量的延时操作,比如延迟生产,延迟拉取,延迟删除等,这些延时操作并不是基于 JDK 自带的 Timer 或者 DelayQueue 实现,而是**基于时间轮的概念自己实现了一个延时定时器**,JDK 中 Timer 和 DelayQueue 的插入和删除操作的平均时间复杂度为O(nlogn), 并不能满足 Kafka 的高性能要求,而基于时间轮可以将插入和删除操作的时间复杂度都降为 O(1)。
kafka中的时间轮是一个存储定时任务的环形队列,底层采用数组实现,
数组中的每个元素可以存放一个定时任务列表(TimerTaskList),
TimerTaskList是一个环形的双向链表,链表中的每个元素TimerTaskEntry封装了一个真正的定时任务TimerTask。时间轮由固定格数(wheelSize)的时间格组成,每一格都代表当前时间轮的基本时间跨度(tickMs),整个时间轮的总体时间跨度(interval)就是 wheelSize*tickMs。时间轮还有一个表盘指针(currentTime),其值是tickMs的整数倍,用来表示时间轮当前所处的时间,表示当前需要处理的时间格对应的TimeTaskList 中的所有任务。
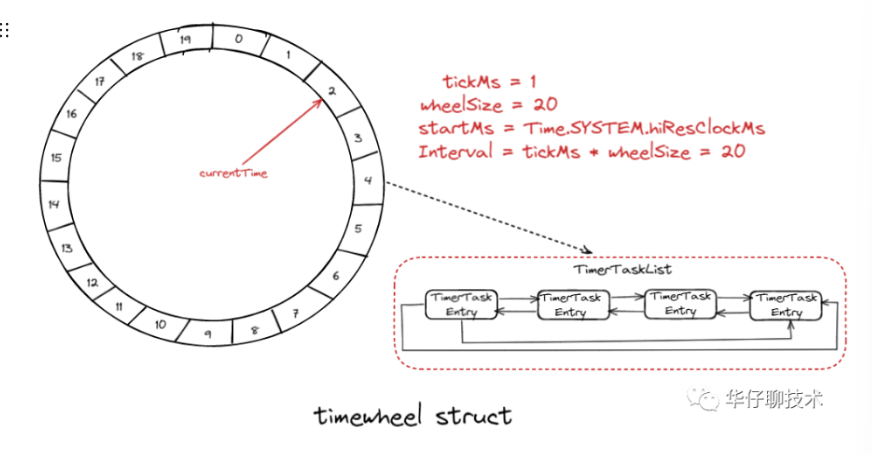
- 时间轮的tickMs为1ms,wheelSize等于20,总体时间跨度interval就是20ms,初始情况下currentTime指向时间格0。
- 此时有一个定时为2ms的任务插进来,就会放到时间格为2的TimeTaskList中,当currentTime指向时间格2时,就需要执行时间格为2对应的TimeTaskList中的任务。
- 此时若又一个定时为8ms的任务插进来,则会放在时间格10中。当currentTime指向时间格10时,同理执行对应的任务。如果此时又插入了一个定时19ms的任务怎么办呢?新来的TimerTaskEntry会复用原来的TimerTaskList,所以它会插入到原本已经到期的时间格1中。
总之,整个时间轮的跨度是不会变的,随着currentTime的不断推进,当前时间轮所能处理的时间段也在不断后移,总体时间范围就是currentTime和currentTime + interval之间。那么,问题又来了,如果一个新的定时任务远远超过了当前的总体时间范围,比如350ms,那怎么办呢?
为此,kafka引入了层级时间轮的概念,当任务到期时间远远超过当前时间轮所表示的时间范围时,就会尝试添加到上层时间轮中。
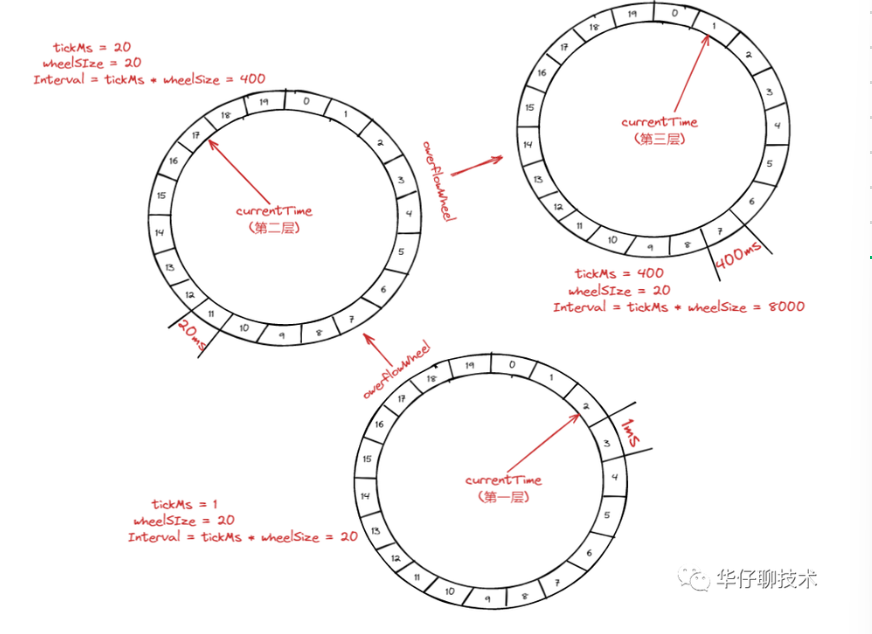
如上图:
- 第一层时间轮:tickMs= 1ms 、wheelSize=20 、interval=20ms。
- 第二层时间轮的tickMs 为第一层时间轮的interval,即20ms,每一层时间轮的wheelSize是固定的,都是20,那么第二层时间轮的总体时间跨度就是400ms。
- 依次类推,第三层的时间轮的interval为400ms,那么总体时间跨度就是8000ms。